comThink
RX-Controller mit Python Programmieren
In dem RX-Controller ist ein MicroPython implementiert. MicroPython implementiert einen Teil der Python Standard Library. Die Version, die auf dem RX-Controller läuft, ist mir nicht bekannt.
Python-Muster
import fischertechnik.factories as ff
from fischertechnik.logging import log as print
import asyncio
async def check(t1,led):
while True:
# tuwas mit t1 und led
await asyncio.sleep(0.05)
async def run(controller):
# Faktories initialisieren
ff.init_controller_factory()
ff.init_motor_factory() # Motor
ff.init_input_factory() # Taster, Reed-Switch
ff.init_output_factory() # LED
ff.init_i2c_factory() # Gestensensor
m1 = ff.motor_factory.create_motor(controller, 1) # Motor
t1 = ff.input_factory.create_mini_switch(controller, 1) # Taster
reed = ff.input_factory.create_mini_switch(controller, 2) # Reed-Switch
led1 = ff.output_factory.create_led(controller, 2) # LED
sensor = ff.i2c_factory.create_gesture_sensor(controller, 1) # Gestensensor
# nicht-blockierende Task
task1 = asyncio.create_task(check(t1,led1))
task1.cancel()
while True:
# Taster
t1.is_open()
t1.is_closed()
t1.get_state()
# LEDs
led1.set_brightness(512)
led1.set_brightness(0)
# Motor
m1.set_speed(200, 1) # 1 oder -1
m1.start(),
m1.stop()
# Gestensensor als Gestensensor
sensor.enable_gesture()
sensor.get_gesture()
sensor.disable_gesture()
# Gestensensor als Lichtsensor
sensor.enable_light()
sensor.get_rgb() # Farberkennung
sensor.get_hex()
sensor.get_hsv()
sensor.get_ambient() # Umgebungslicht
sensor.disable_light()
# Gestensensor als Näherungssensor
sensor.enable_proximity()
sensor.get_proximity()
sensor.disable_proximity()
await asyncio.sleep(0.01)
Beispiel: Blinklicht
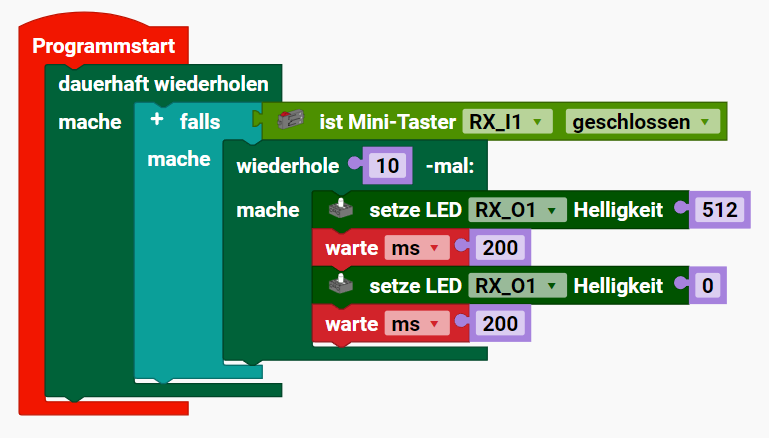
import fischertechnik.factories as ff
from fischertechnik.logging import log as print
import asyncio
async def run(controller):
ff.init_controller_factory()
ff.init_input_factory() # Taster
ff.init_output_factory() # LED
t1 = ff.input_factory.create_mini_switch(controller, 1) # Taster I1
led1 = ff.output_factory.create_led(controller, 1) # LED O1
while True:
if t1.is_closed():
for i in range(10):
led1.set_brightness(512)
await asyncio.sleep(0.2)
led1.set_brightness(0)
await asyncio.sleep(0.2)
await asyncio.sleep(0.01)
Beispiel: Handbewegung
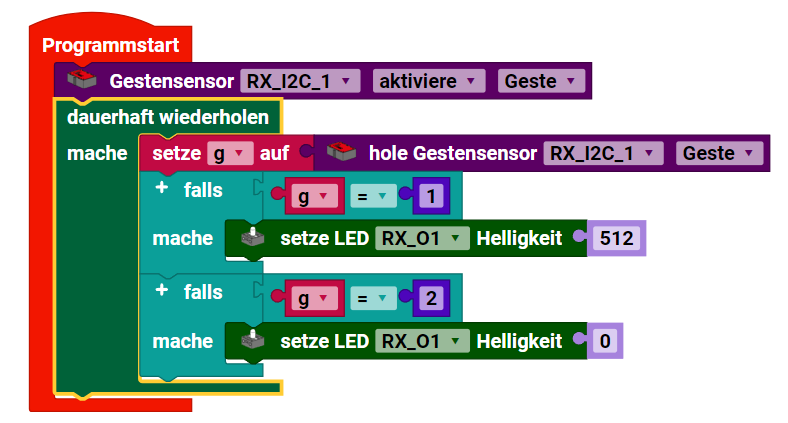
import fischertechnik.factories as ff
from fischertechnik.logging import log as print
import asyncio
async def run(controller):
ff.init_controller_factory()
ff.init_output_factory() # LED
ff.init_i2c_factory() # Gestensensor
led1 = ff.output_factory.create_led(controller, 1) # LED O1
sensor = ff.i2c_factory.create_gesture_sensor(controller, 1) # Gestensensor EXT1
sensor.enable_gesture()
while True:
g = sensor.get_gesture()
if g == 1:
led1.set_brightness(512)
elif g == 2:
led1.set_brightness(0)
await asyncio.sleep(0.01)
Beispiel: Mehrere Blinklichter
Dieses Beispiel ist in Python deutlich einfacher als in Scratch oder Blockly. Hier können wir Tasks losschicken, die den Rest nicht blockieren. Diese Möglichkeit haben wir in Scratch oder Blockly nicht.
import fischertechnik.factories as ff
from fischertechnik.logging import log as print
import asyncio
async def toggle_led(led, on_time, off_time):
while True:
led.set_brightness(512)
await asyncio.sleep(on_time)
led.set_brightness(0)
await asyncio.sleep(off_time)
async def run(controller):
ff.init_controller_factory()
ff.init_output_factory()
led3 = ff.output_factory.create_led(controller, 3)
led2 = ff.output_factory.create_led(controller, 2)
led1 = ff.output_factory.create_led(controller, 1)
asyncio.create_task(toggle_led(led3, 1, 2))
asyncio.create_task(toggle_led(led2, 2, 1))
asyncio.create_task(toggle_led(led1, 0.5, 0.2))
while True:
await asyncio.sleep(0.01)